
 �ھ��ͷ�
�ھ��ͷ�
 ��I(y��)��
��I(y��)��







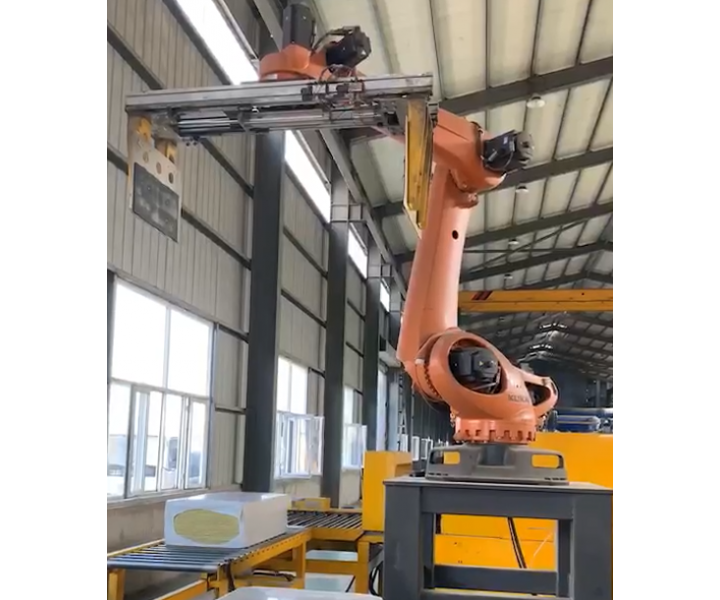
ABB�C���˼���a��
���\�a���ԭ��������һ������ԭ����һ������Ʒ�ѳɴa����߰��\��ָ��λ������ʹ��Ԫ���Ĵa�⌍�F(xi��n)���ϵİ��\���惦���bж�\ݔ?sh��)�����������ɸ��?j��)���S�F(xi��n)�����H���\ؓ�d���ߴ������\�a��ķ�ʽ���_���Cе�۵��S��(sh��)����չ��ؓ�d��
����Ԕ��ɲ�ԃ��ABB�a���Ŀ����|�����OӋ|���g(sh��)֧��




�j����")


�j110")